

お久しぶりです。
もってぃです。
最近、我がチームのメンバーが増えました。
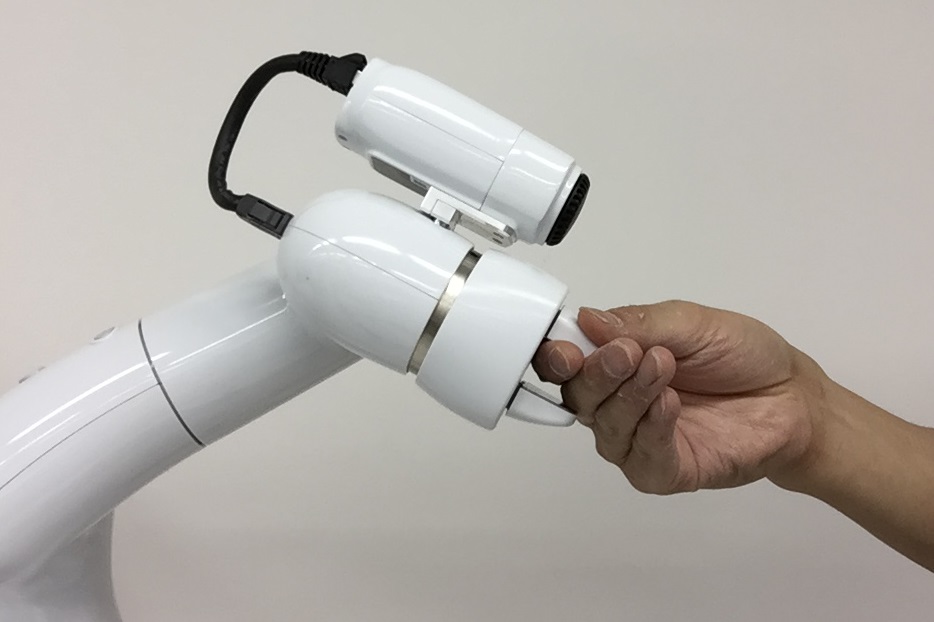
新しいメンバはこちらの方。
協働型ロボットCOBOTTAさん

デンソーウェーブさんからやってきました。
得意なことは人と一緒に働くことであります。
今は私の隣の席に座って頂いております。
既に展示会の弊社ブースではご活躍頂いていましたが、
弊社オフィスでも一緒に働けることになりました。
よろしくお願いします。
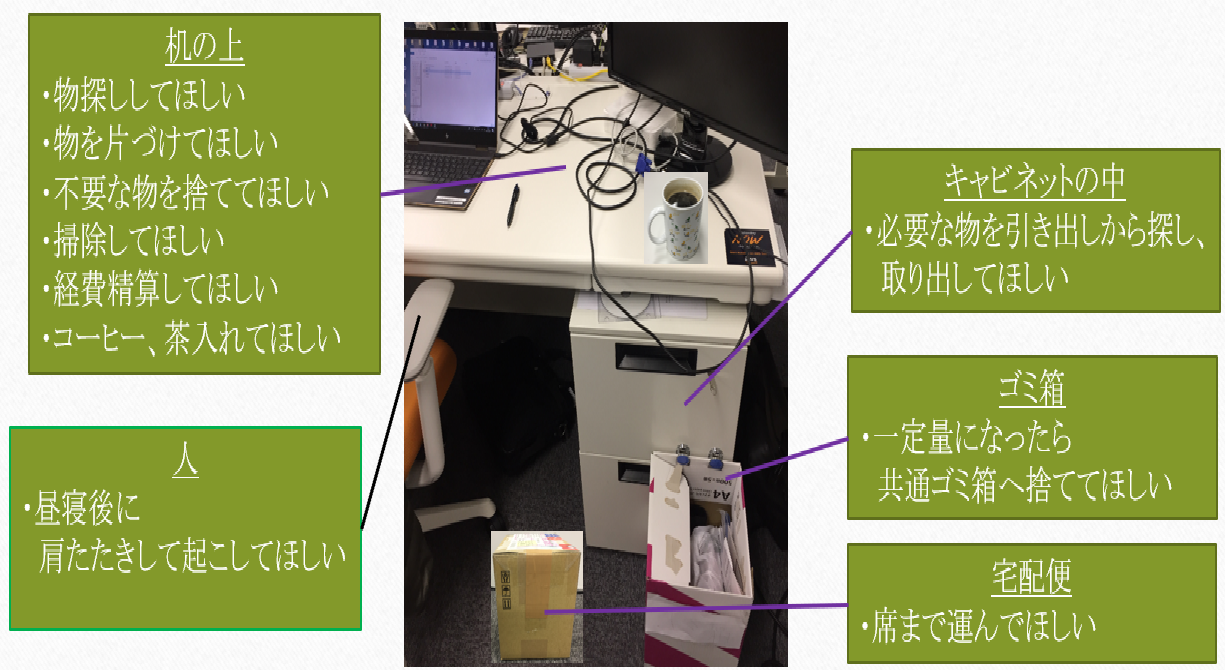
お願いしたいこと
とりあえず、しばらくは私の願望を1つ1つ成し遂げるべくお手伝い頂きます。
願望一覧はこちら。
初仕事
まずは掃除をして頂きましょう。
本当は私の机を掃除して頂きたいですが、
今は別席になっているので、
ひとまずはCOBOTTAさん自身の周りの掃除をお願いしてます。
COBOTTAさんのマネジメント方法
COBOTTAさんに作業を行っていただくためには3つのプロセスが必要です。
1、準備
2、手取り足取りアームの通過点を教える
3、通過点の順序、およびハンド開閉をプログラミングする
なんだか難しそうに見えますが、
実際やってみると、とても簡単ですよ~。
なお今回、準備編の記載は省略します。
通過点を教える
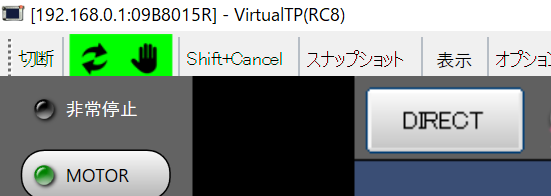
1、シミュレーター RC8でdirect モードにする(ティーチングモード)
2、COBOTTAさん背中の丸いボタンを押す
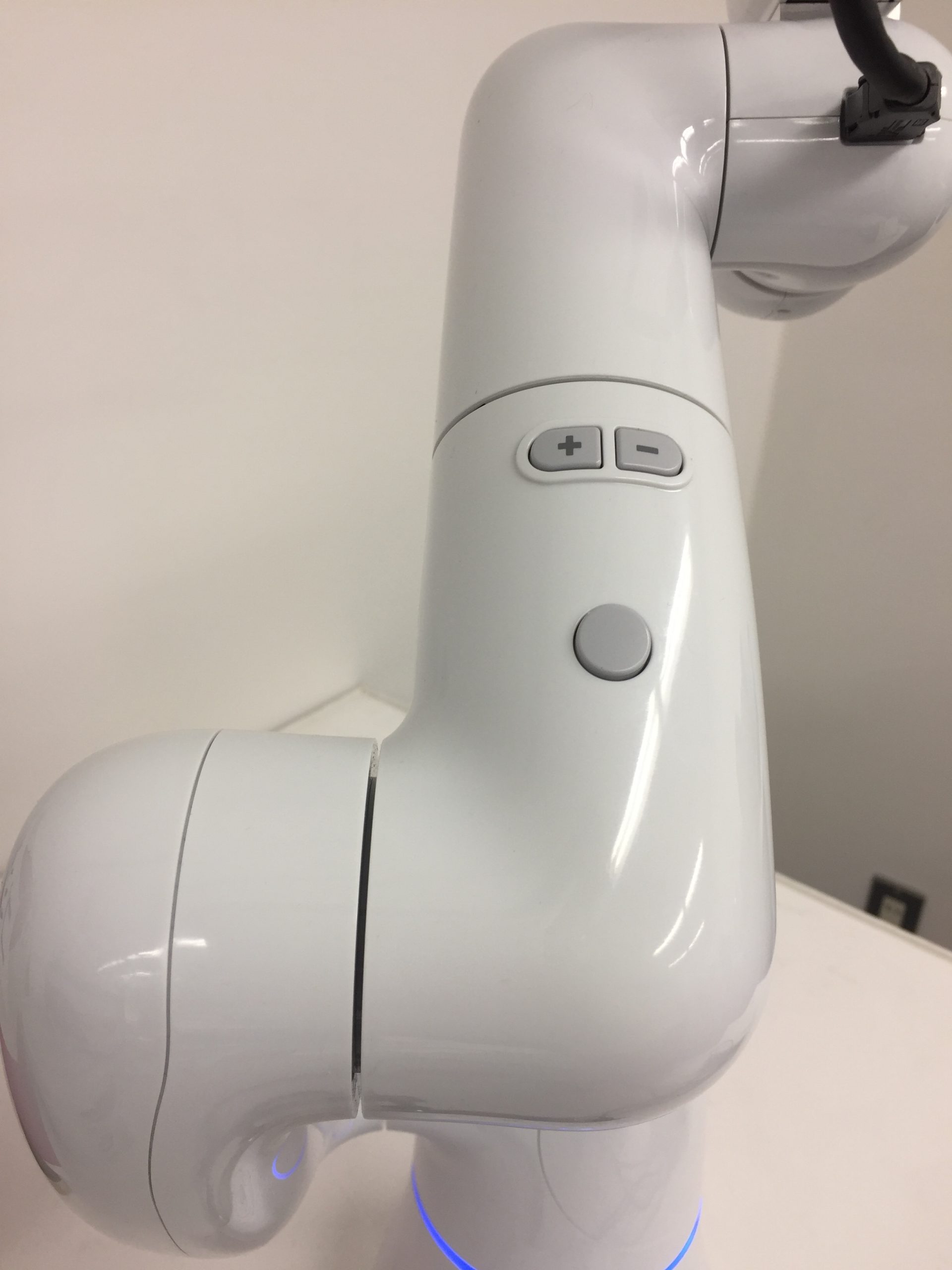
3、アームをゴリゴリ動かし、通過点を1点ずつ決める。

プログラムを実装
実装と言ってもそんなに難しくないです。
プログラムを実装する場合、2通りの方法があります。
今回はRC8上で動く***.pcsファイルに実装する方法を紹介します。
ここでは2019年4月6日20:00に自動的に掃除を開始するプログラムを実装してます。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 |
Sub Main TakeArm Keep = 0 Call Cleaning End Sub Sub Cleaning ’2019年4月6日20:00になるまで待ち続ける Wait Time ="20:00:00" Wait Date ="2019/04/06" ’点11の15mm上方へ移動 Approach P, P[11], @0 15 Move L, @0 P[11] ’ハンドを開く HandUnChuck 5 Approach P, P[7], @0 10 Move L, @0 P[7] ’ハンドを閉じる HandUnChuck 6 Delay 500 Depart L, @0 10 Move L, @0 P[11] Approach P, P[8], @0 15 Move L, @0 P[8] Approach P, P[10], @0 0 Approach P, P[8], @0 0 Approach P, P[28], @0 0 Approach P, P[27], @0 0 Approach P, P[28], @0 0 Approach P, P[11], @0 0 Move L, @0 P[11] Approach P, P[13], @0 0 Approach P, P[9], @0 15 Move L, @0 P[9] ’ハンドを開く HandUnChuck 5 Delay 500 Approach P, P[9], @0 15 Approach P, P[13], @0 0 Approach P, P[11], @0 0 Move L, @0 P[11] End Sub |
いざ!掃除!
実行するには、上記のプログラムを起動するだけです。
行えるようになる作業はこちら。
ぜひご覧ください!
チャンネル登録もよろしくお願いします。
次なる野望へ
COBOTTAさんのできる仕事、どんどん増やしていきます。
COBOTTAさんにお願いしてみたい仕事ありましたら、
ぜひご連絡ください!!